Voir Elektor juillet aout 1988, testeur de servo avec un seul 555 (que j’avais construit quelques années + tard quand plusieurs fabricants ont sorti des jeux de lumières mobiles avec de ces moteurs) :
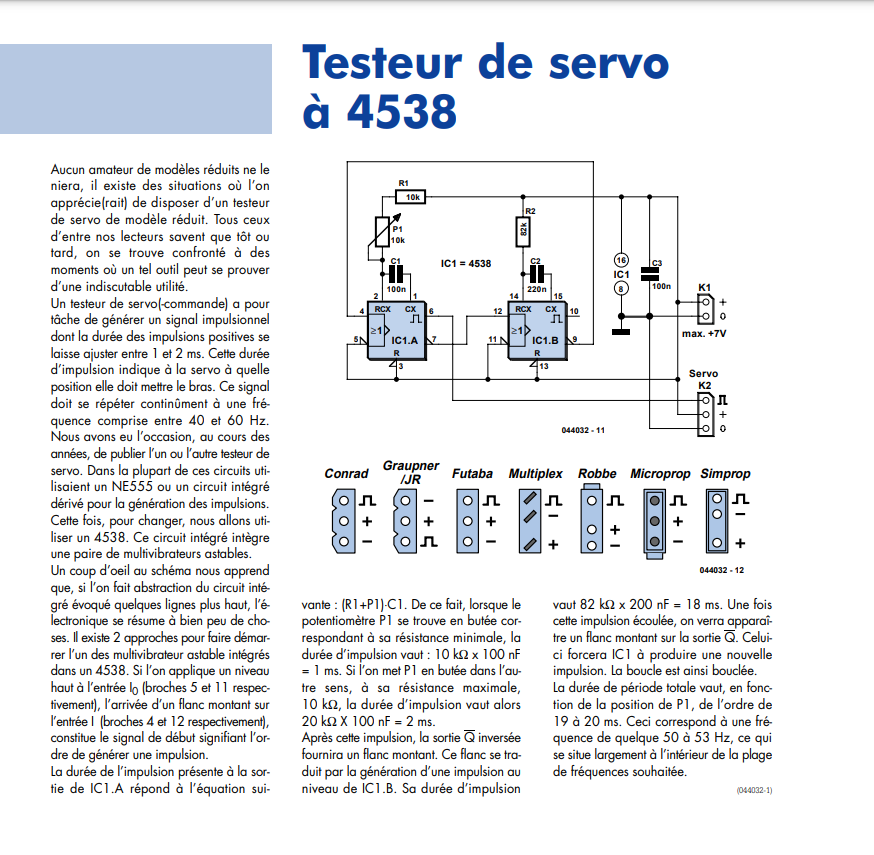
Un autre montage, toujours dans Elektor, en juillet août 2004 mais ici avec un IC double tempo CMOS. Intéressant, car le brochage des connecteurs de plusieurs fabricants est présent :
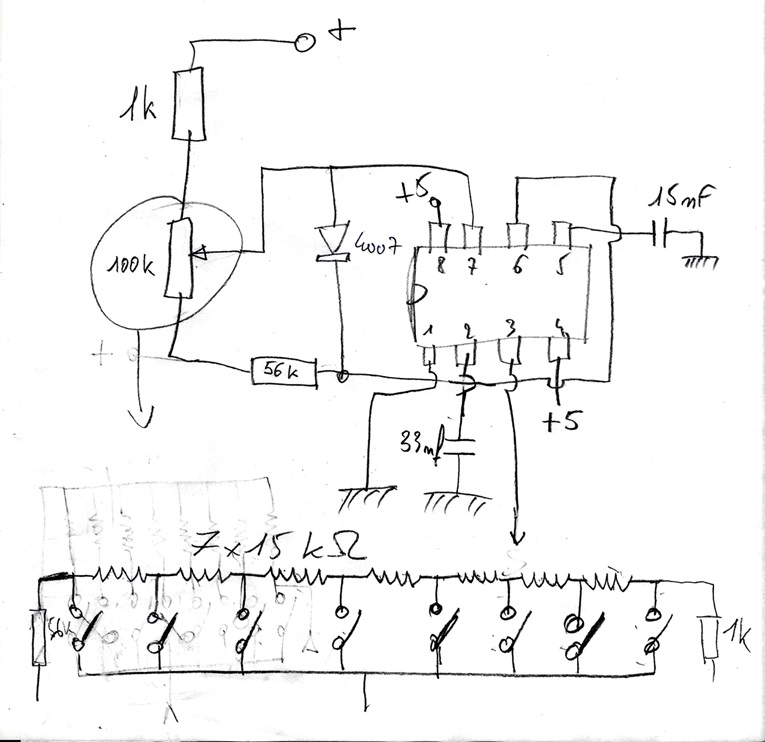
J’ai enfin obtenu un résultat correct en bidouillant. Je m’obstinais à vouloir conserver la fréquence de 50 Hz. Alors j’ai mis d’autres valeurs de composants (un peu au pifomètre, j’avoue) et une fois la fréquence montée à 200 Hz, ça fonctionne. Voici le montage réalisé :
Dans l’immédiat, commande avec 8 relais et je verrai dans un deuxième temps si je peux augmenter le nombre de segments afin de réduire les angles de déplacement du servo. Avec 8 bits je peux faire davantage je pense.
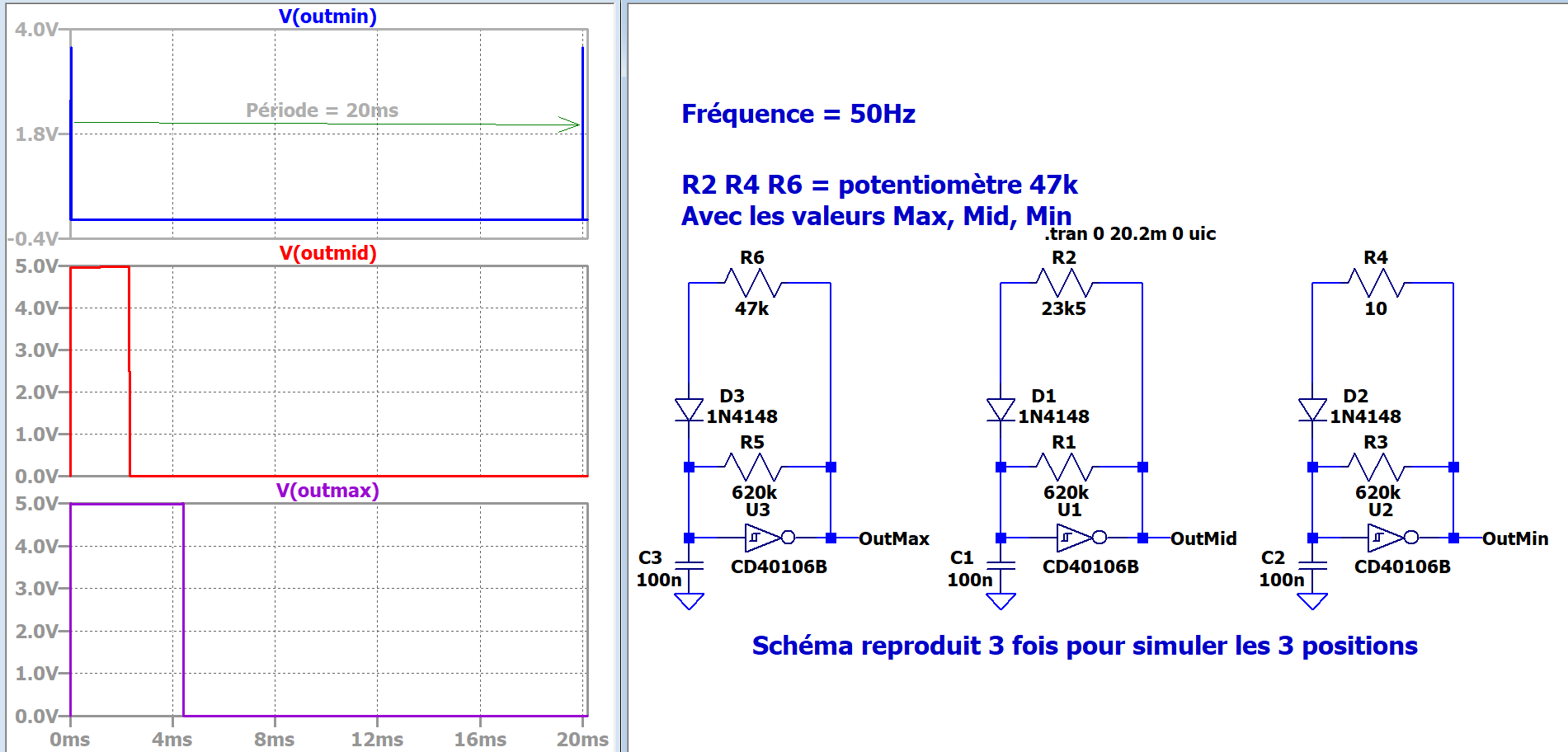
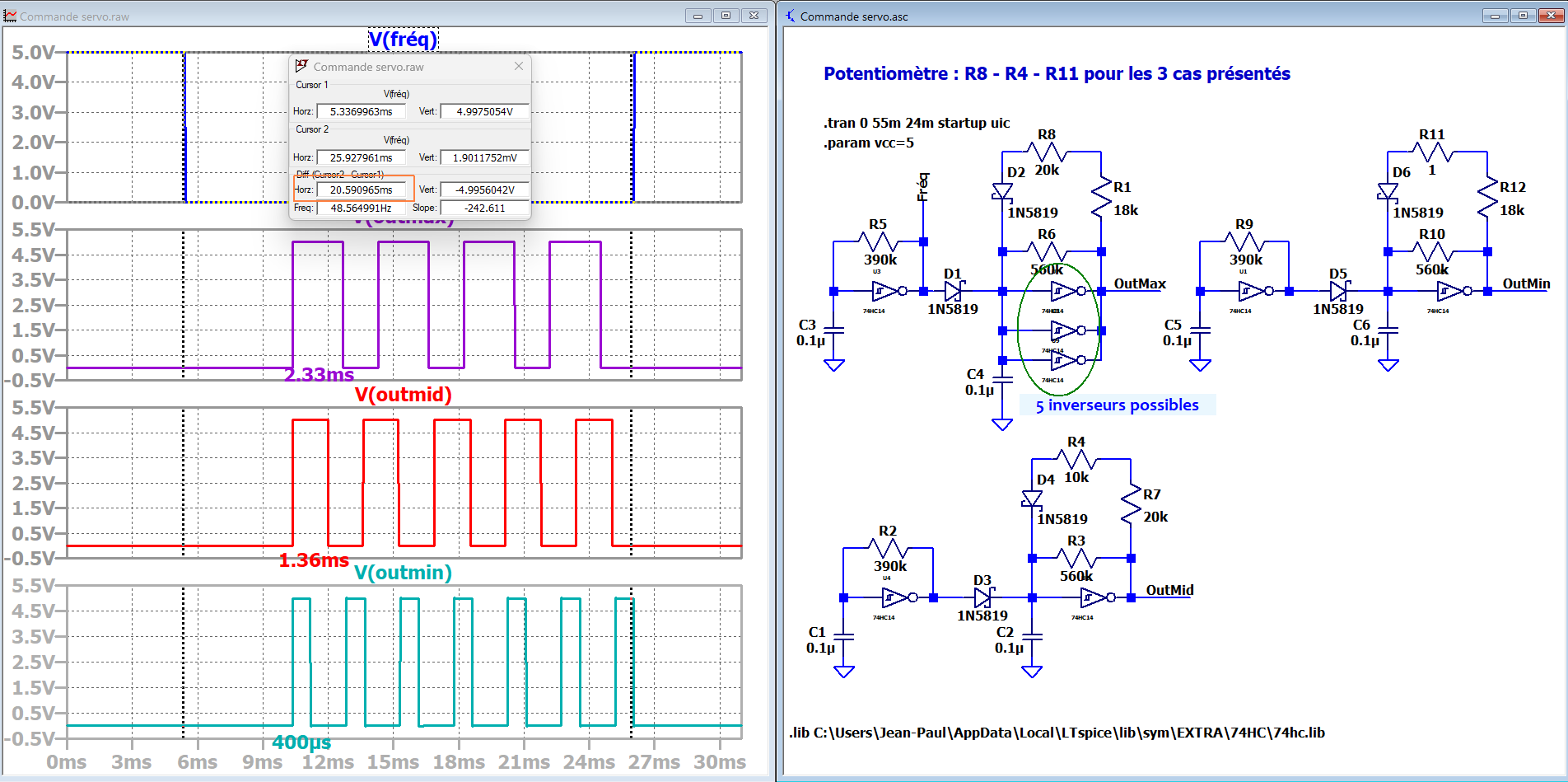
Une variante à base d’inverseur à trigger de Schmidt.
Et la simulation qui va bien.
En fonction des inverseurs utilisés, il y a possibilité de les câbler en // pour augmenter le courant de sortie mais je ne sais plus lesquels (mémoire de rouge)…
Avec le servo raccordé et en cas d’alimentation commune, il y aura peut-être des « Jitters ». En clair, le servo risque d’avoir la tremblote.
Dans ce cas, il sera préférable de distinguer les 2 alims (en gardant la masse commune bien entendu).
Bonjour à tous,
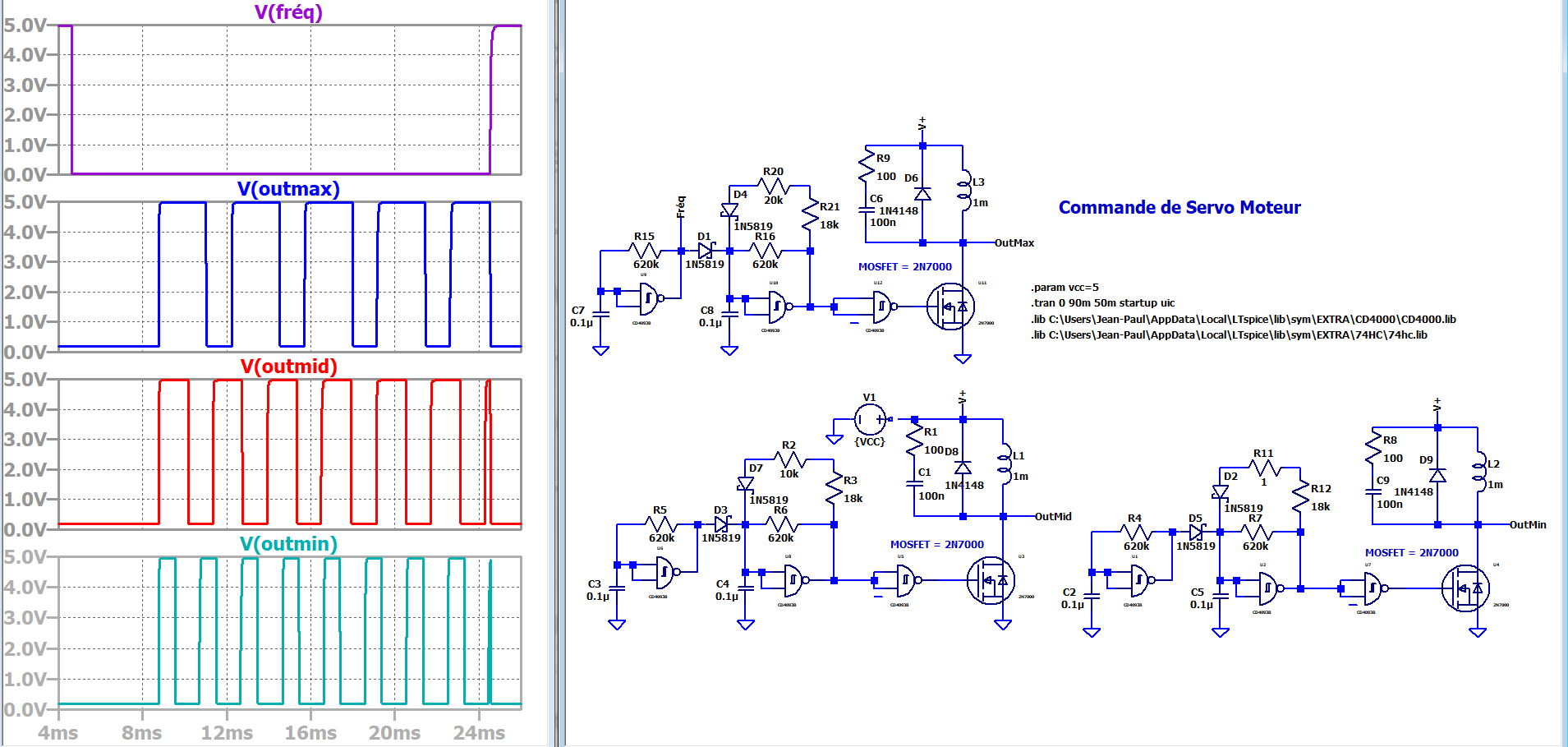
Après réflexion, il est judicieux comme indiqué par notre ami @Radiolo de générer les pulses séparément.
Et donc, voici l’objet de mes cogitations :
Il resterait à muscler le signal de sortie avec un petit mosfet par exemple car le 40106 est limité à environ 3mA pour 5V d’alimentation.
Effectivement, il faut faire autrement. mes essais avec un jeu de résistances ne sont pas concluants non plus. Contrairement au potentiomètre, les saccades provoquées par les changement de résistances doivent créer une mise en l’air qui perturbe le servo qui fait n"importe quoi durant un instant. Même en y plaçant des capacités anti-rebonds.
Questions sur le dernier montage : Le 40106 peut-il être remplacé par un 7404 et peut-on prendre une autre valeur pour la diode schottky ?
Enfin, le problème du rebond ne risque-t’il pas de se reproduire ?
Merci Janpolanton pour le temps passé à vos cogitations.
Et en utilisant un boitier 74HC14, on peut mettre plusieurs inverseurs en //, chaque sortie pouvant délivrer un courant de 25mA, ça nous fait donc un total de 125mA avec 5 inverseurs.
Les 6 inverseurs du boitier sont ainsi tous utilisés.
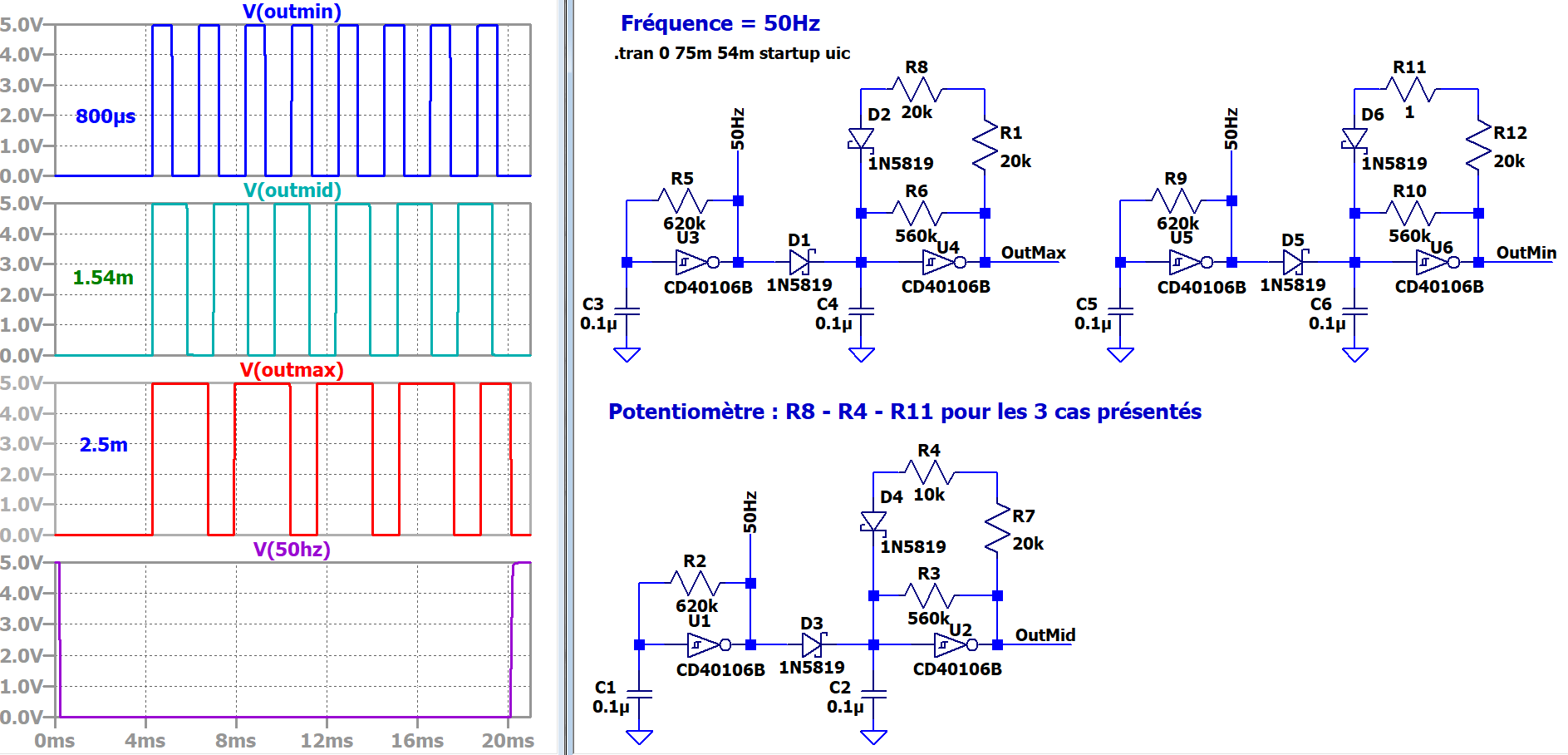
Malheureusement, je ne peux pas câbler cette simulation pour des essais en réel, je n’ai pas de servomoteur dans mon brol… Edité :Je me suis trompé dans la valeur de la résistance R7 (20k au lieu de 18k) Avec cette valeur, la pulse « MID » est de 1.49ms.
Le 7404 ne conviendra pas, il faut un inverseur avec trigger de Schmidt (TTL ou CMOS).
Pour les 2 diodes, malheureusement ça ne fonctionne pas avec des 1N4148 mais oui, n’importe quelle Schottky devrait convenir.
On peut aussi utiliser un CD4093 en reliant les 2 entrées ensemble mais il faudra alors muscler le courant de sortie.
Allez hop!
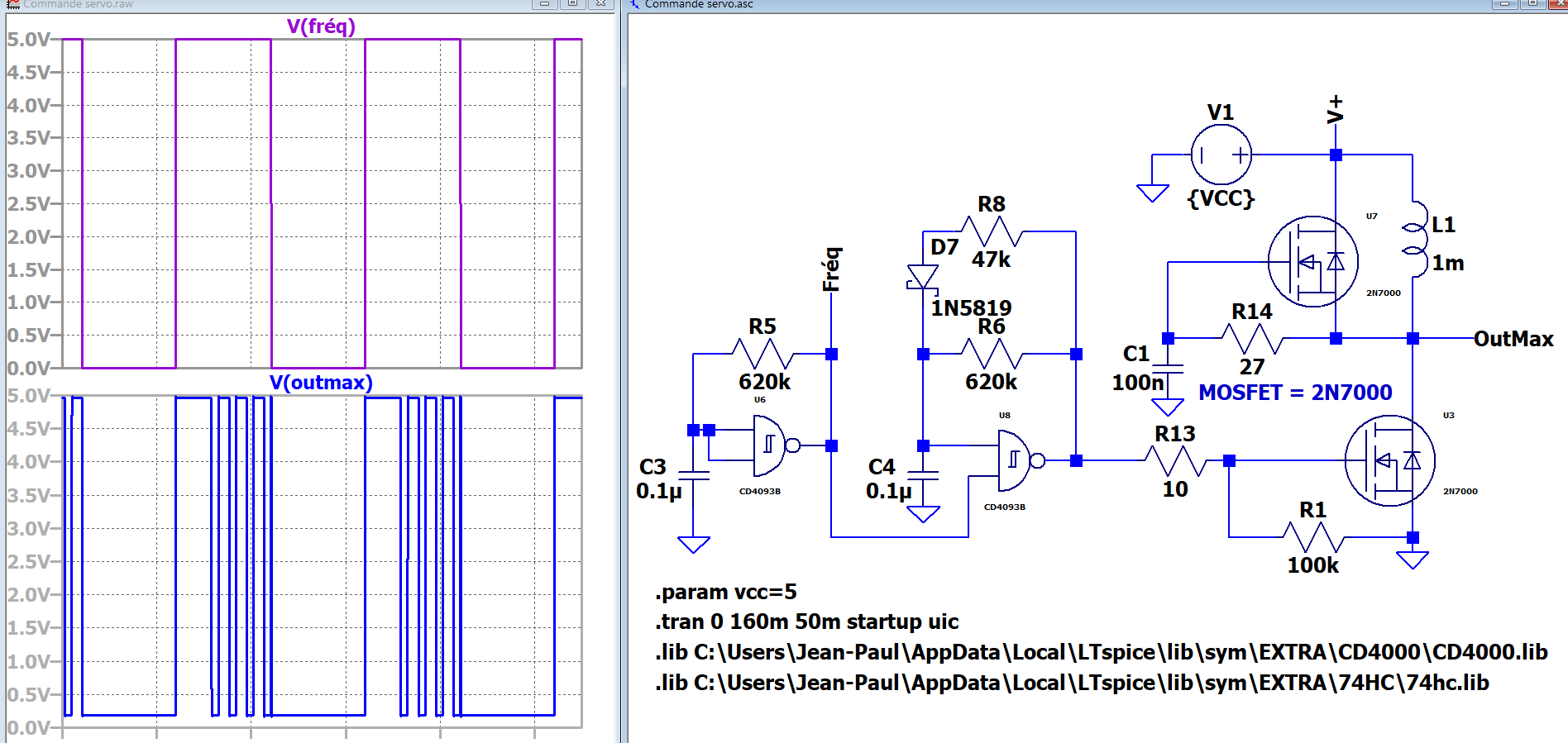
Dans la foulée, une variante avec un CD4093 et une sortie sur un mosfet standard 2N7000.
Le 2ème mosfet associé à la résistance et au condensateur sert de circuit « snubber » pour supprimer les pics de tension induite.
Un PIC12F1571 peut piloter 3 servos via ses 3 PWM. Si on utlise les entrées analogiques pour les piloter, on sera limité à 2 voies. Si on passe par un UART (facile) on peut utiliser les 3 PWM. Tout ça avec un circuit 8 pattes sans aucun composant externe. Modification des fréquences ? Une reprogrammation et c’est réglé en quelques minutes. Compliqué, marteau-pilon selon certains. Quand je vois les solutions proposées, un truc a dû m’échapper !
L’intérêt de mettre un microcontrôleur en tampon serait également de pouvoir remonter facilement au programme des données d’un tas de capteurs (température, humidité…).
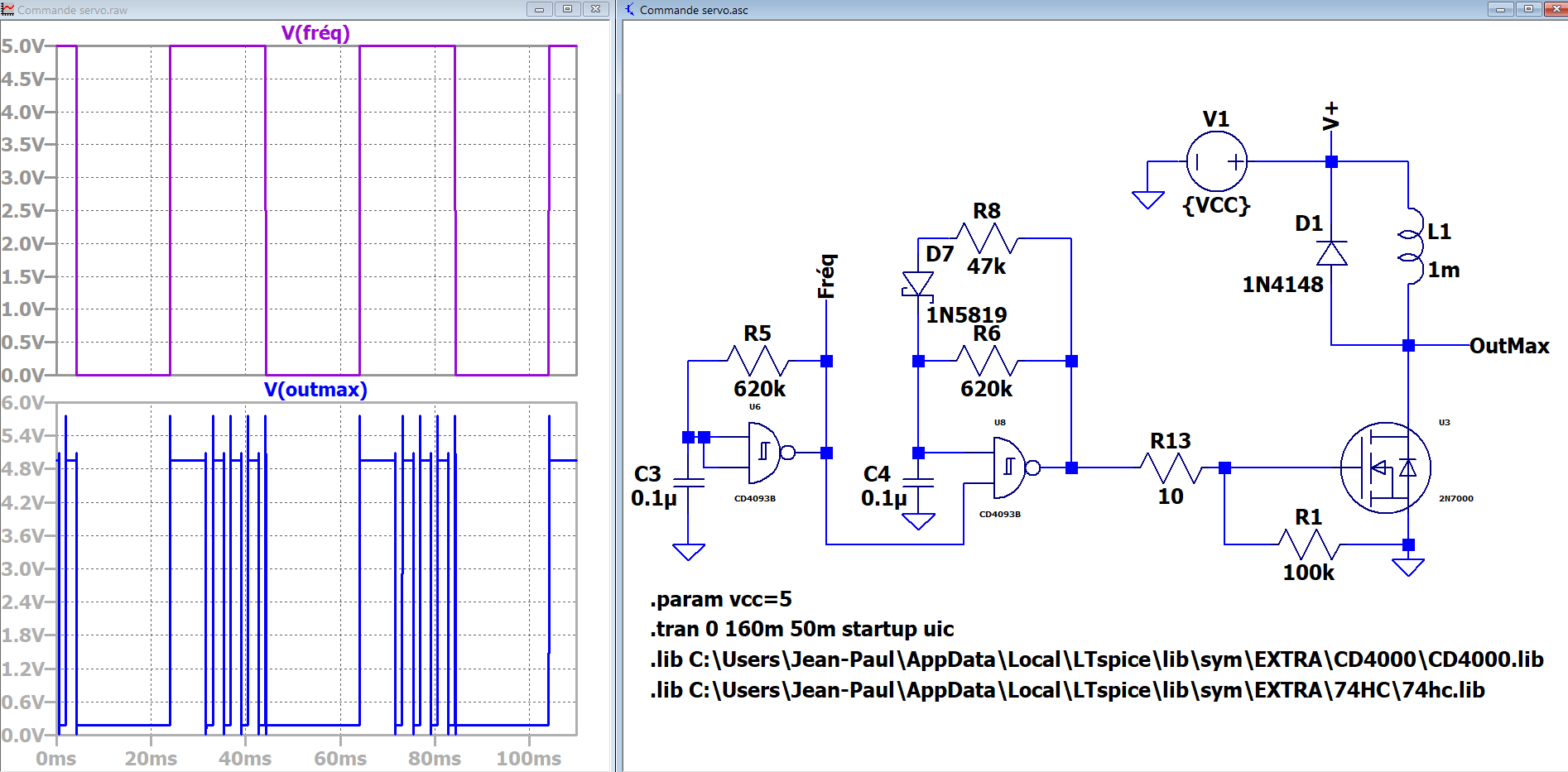
Bon, ça semblait fonctionner mais le circuit RC du snubber mettait le boxon sur la durée des pulses Max - Mid et Min qui étaient toute identiques.
Je suis revenu au snubber RC - diode et j’ai inversé les signaux qui attaquent le mosfet
Bonjour à tous,
Pour ceux qui suivaient ce topic, l’ami @Phil83 a souhaité le poursuivre sur mon forum.
Il trouvait ça plus logique, le sujet ne correspondant pas vraiment à la thématique de Retrotechnique.
Donc, la suite de cette aventure c’est ici
 Doctsf (Modèles & Marques)
Doctsf (Modèles & Marques) Annonces
Annonces