Bonjour,
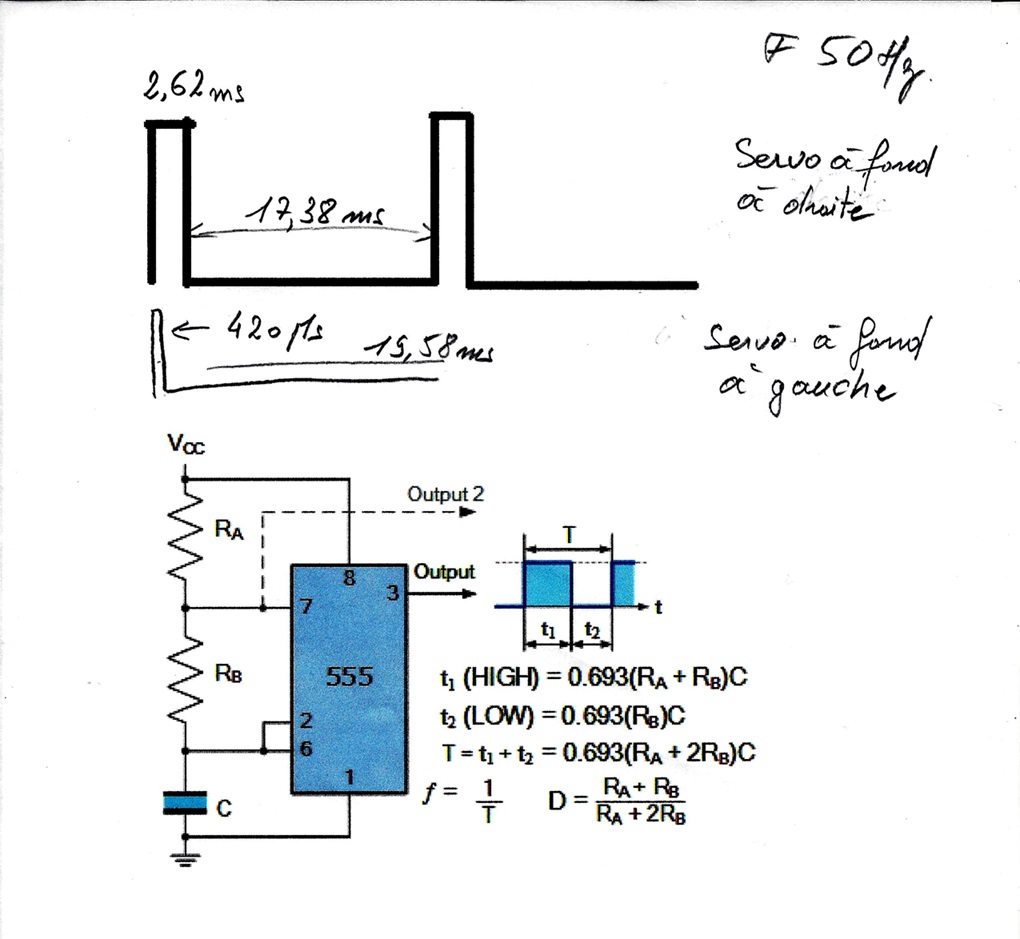
J’ai bien essayé ce montage mais le résultat n’est pas satisfaisant. Le servo ne couvre pas les 180°.
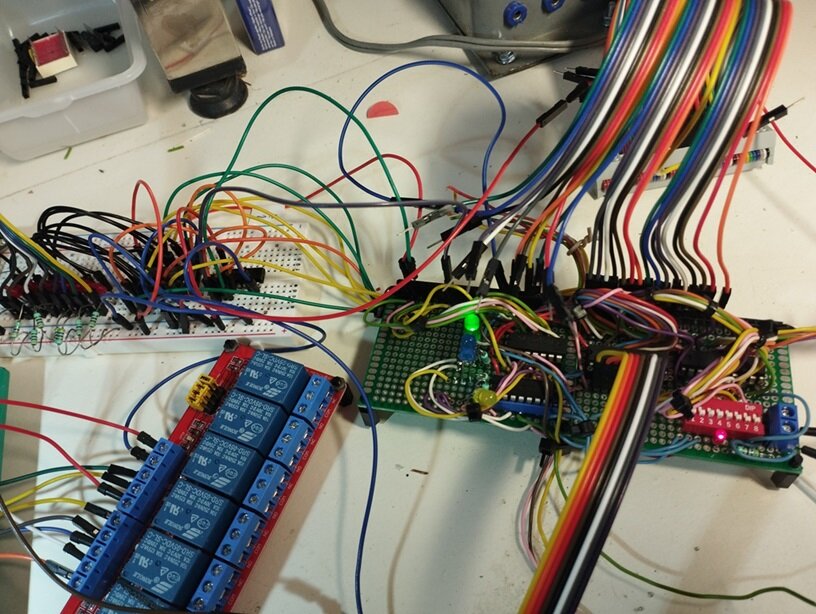
Pour comprendre, j’ai décidé de vous présenter mon bidouillage :
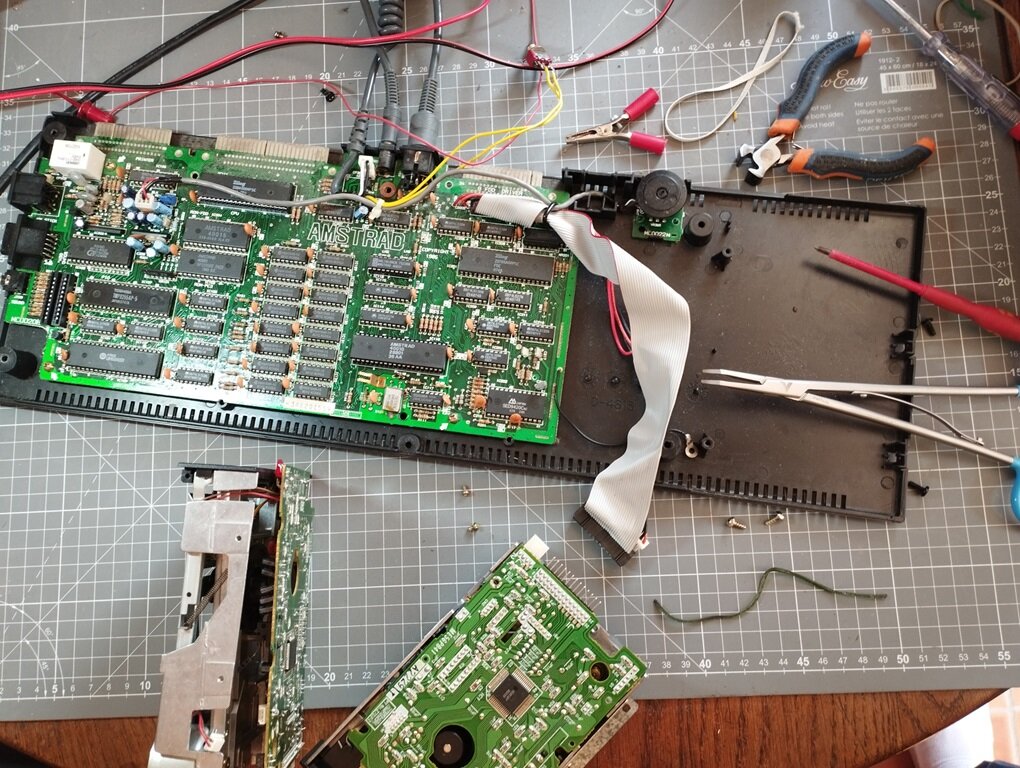
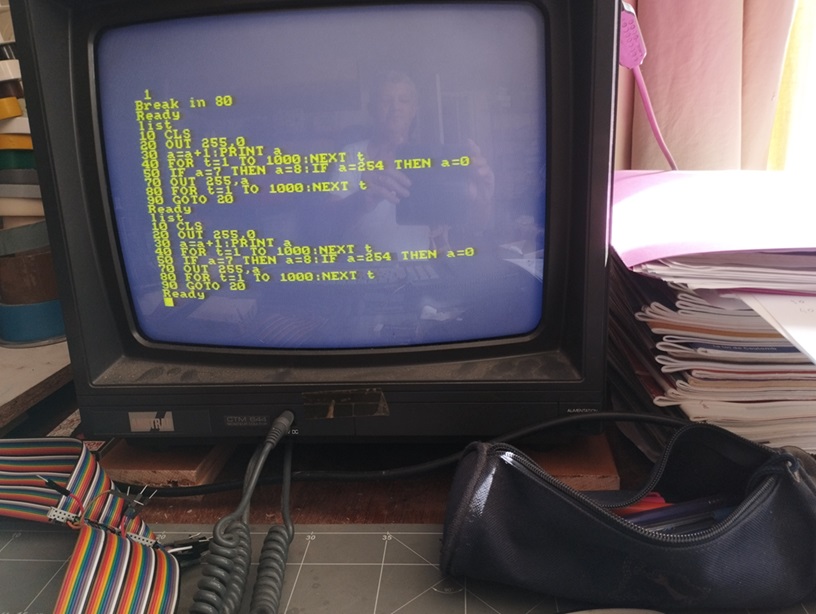
Je remis en fonction mon vieil ordinateur Amstrad qui dormait au grenier depuis des années. A l’aide des infos glanées ici même, j’ai réussi à faire le montage d’une interface qui fonctionne plutôt bien. Bien sûr, je fais la programmation en basic, certes c’est un peu lent mais le résultat est bon.
Je peux envoyer ou recevoir un mot de 8 bits soit 255 messages et retour, ce qui est largement suffisant.
Seul curiosité, la valeur 7 bloque le système mais ce n’est pas très grave, il suffit de ne pas l’utiliser sur 255.
Le résultat immédiat : je peux commander une palette de 8 relais, piloter 8 leds dans tous les sens, envoyer ou recevoir un message de 8 bits à l’ordinateur et je sais faire tourner un moteur pas à pas en générant succession de 1,2,4,8 en boucle. Il suffit de programmer 8,4,2,1 pour inverser le sens.
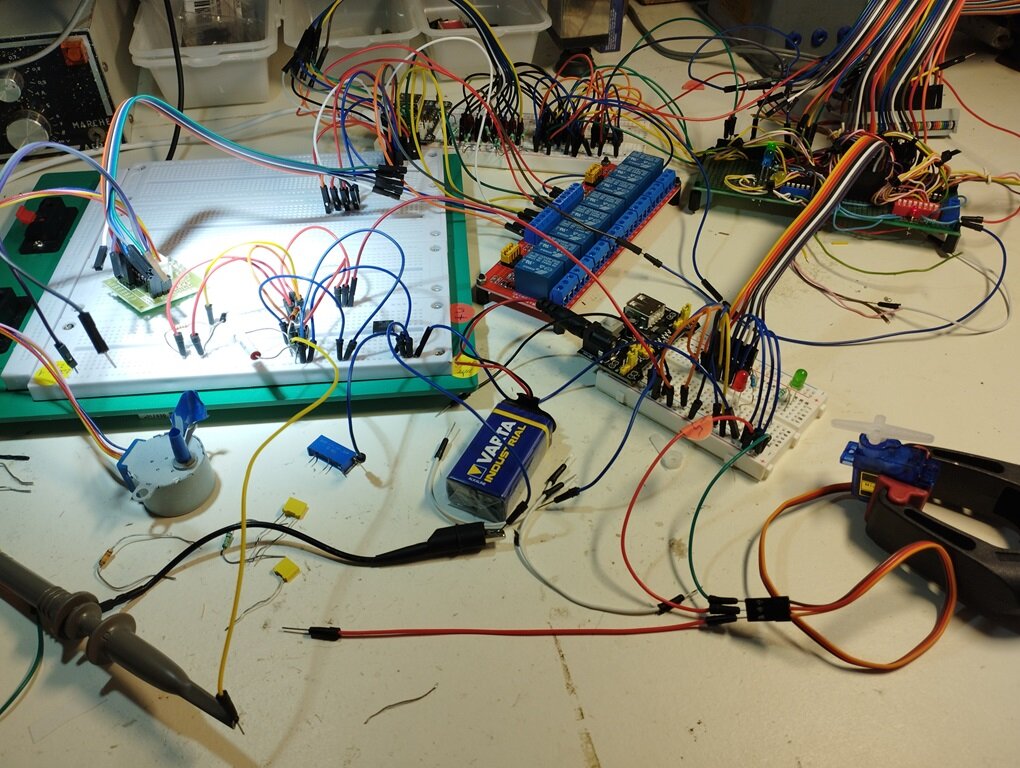
Maintenant la difficulté reste la commande du fameux servo numérique. D’où l’idée d’utiliser plusieurs valeurs de résistances commandées par les 8 relais.
Je pris quelques éléments d’Arduino mais pas question de me lancer dans cette nouvelle programmation du type UART. Le basic Amstrad me revient assez vite et cela me permet de rester dans des technologies plus anciennes qui me correspondent davantage.
La suite sera probablement un mécanisme avec plein de rouages qui ne servira certes à rien mais qui me permet de bidouiller et d’innover.
Les étapes :
Sortie de l’Amstrad du grenier, réparation du lecteur de disquette dont la courroie est cassée et remplacement du l’interrupteur M/A.
Branchement du port de sortie 50 broches avec prise et fils en nappe.
Construction de l’interface par soudure sur carte pastilles (d’où ma recherche d’outil à Wrapper pour la suite)
Construction et branchement des premiers périphériques.
Enfin, programmation de petites boucles de tests sur l’ordi et premiers essais faits au début en allumant un jeu de leds.
 Doctsf (Modèles & Marques)
Doctsf (Modèles & Marques) Annonces
Annonces