J’ai décidé de ressortir du placard ma centrale inertielle
C’est celle que j’avais remise en état il y a déjà presque 20 ans et que j’avais mise sur mon site
Par contre , faute d’alim tri en 400 hertz et d’instruments de bord je ne l’avais jamais faite fonctionner
Aujourd’hui , avec tout les instruments qu’on avait avec Solange et les deux alim 400 hertz en 117 volts j’ai décidé de la remettre en fonction
J’ai commencé par me remettre dans le bain en relisant tout les plans
A la première tentative , sans instruments branchés dessus , j’ai constaté un premier problème
La toupie ne se positionne pas correctement en mode alignement
J’ai essayé plusieurs solutions , j’en suis arrivé à la conclusion que le détecteur de position ne fonctionnait pas
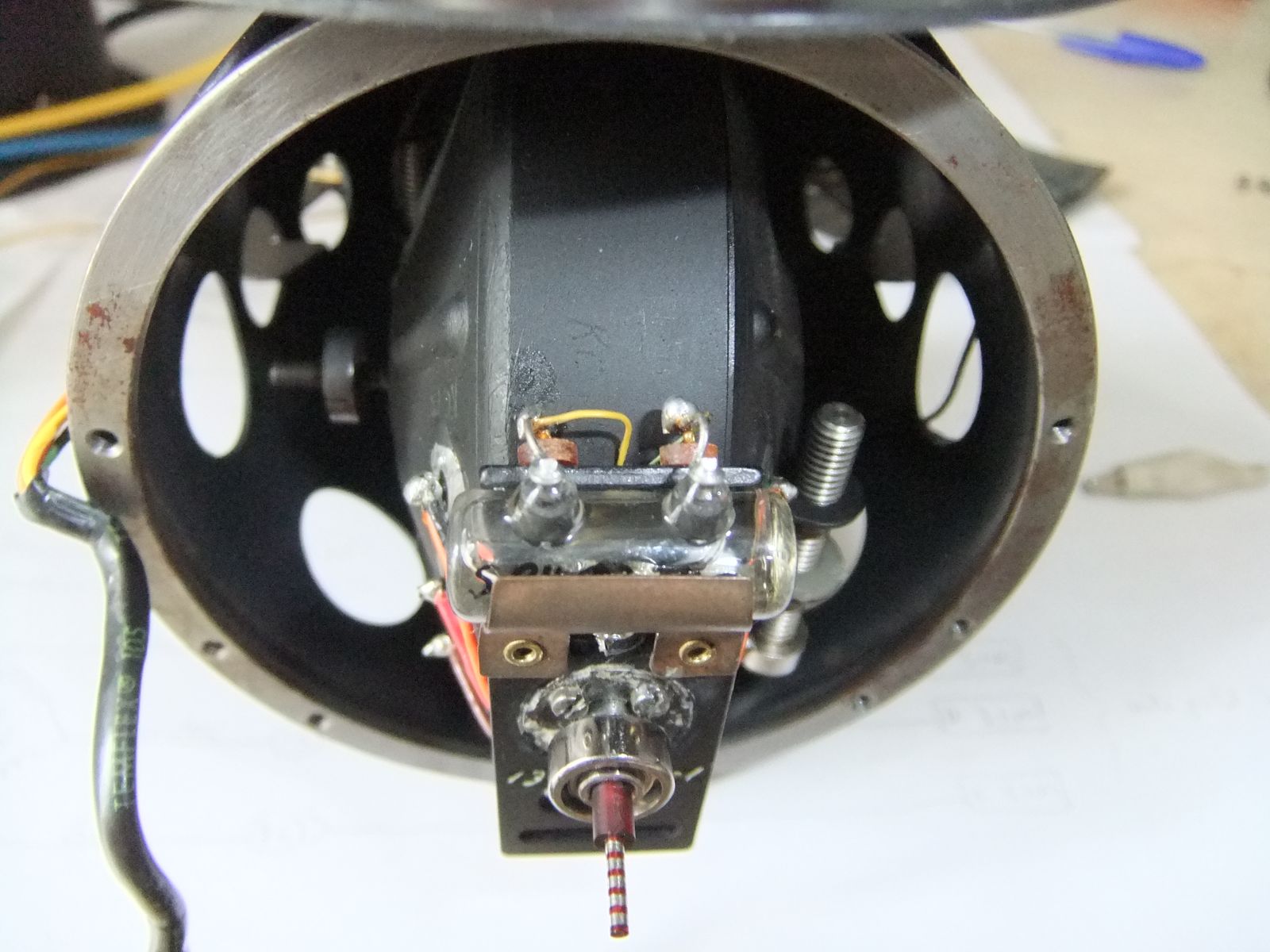
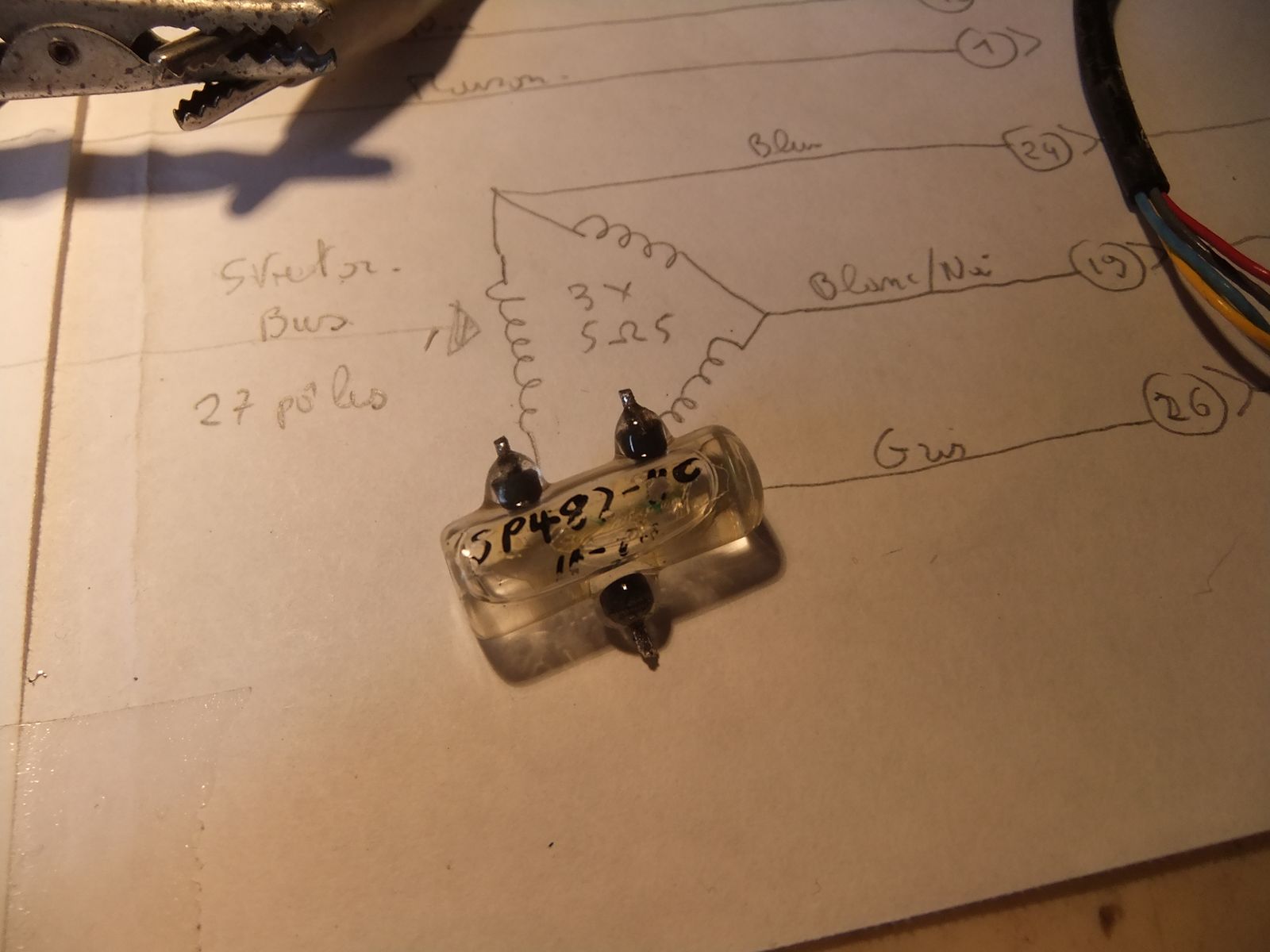
le détecteur en question c’est bien souvent un tube avec deux ou trois électrodes avec une goutte de mercure ou d’électrolyte pour faire contact
Et il se trouve monté sur la cuve de la toupie qui se trouve au centre de la centrale
GRRRR
Pour l’avoir , il faut tout démonter
Et la repose des balais n’est vraiment pas évidente à faire , j’avais bien galéré avec ça la première fois
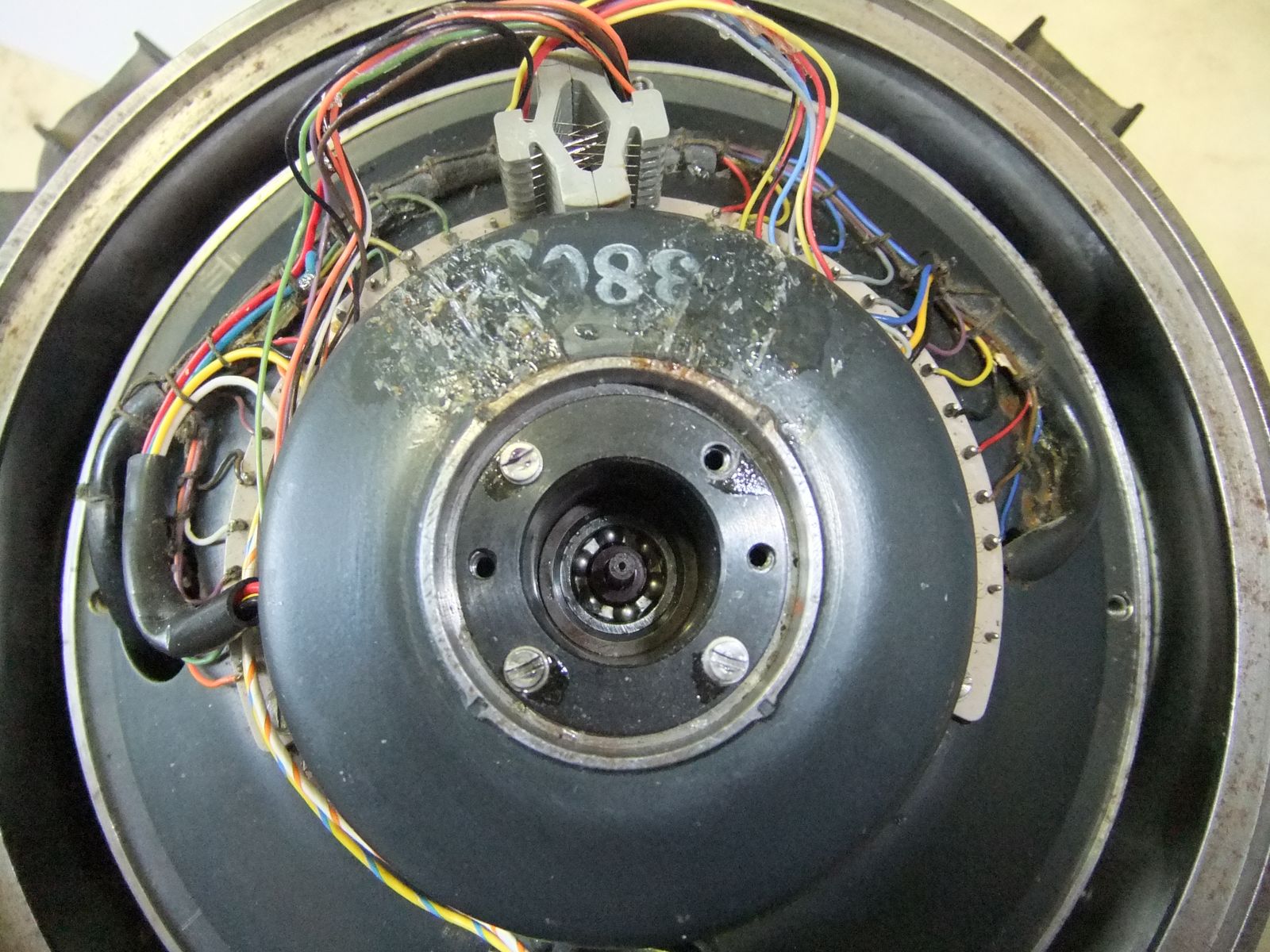
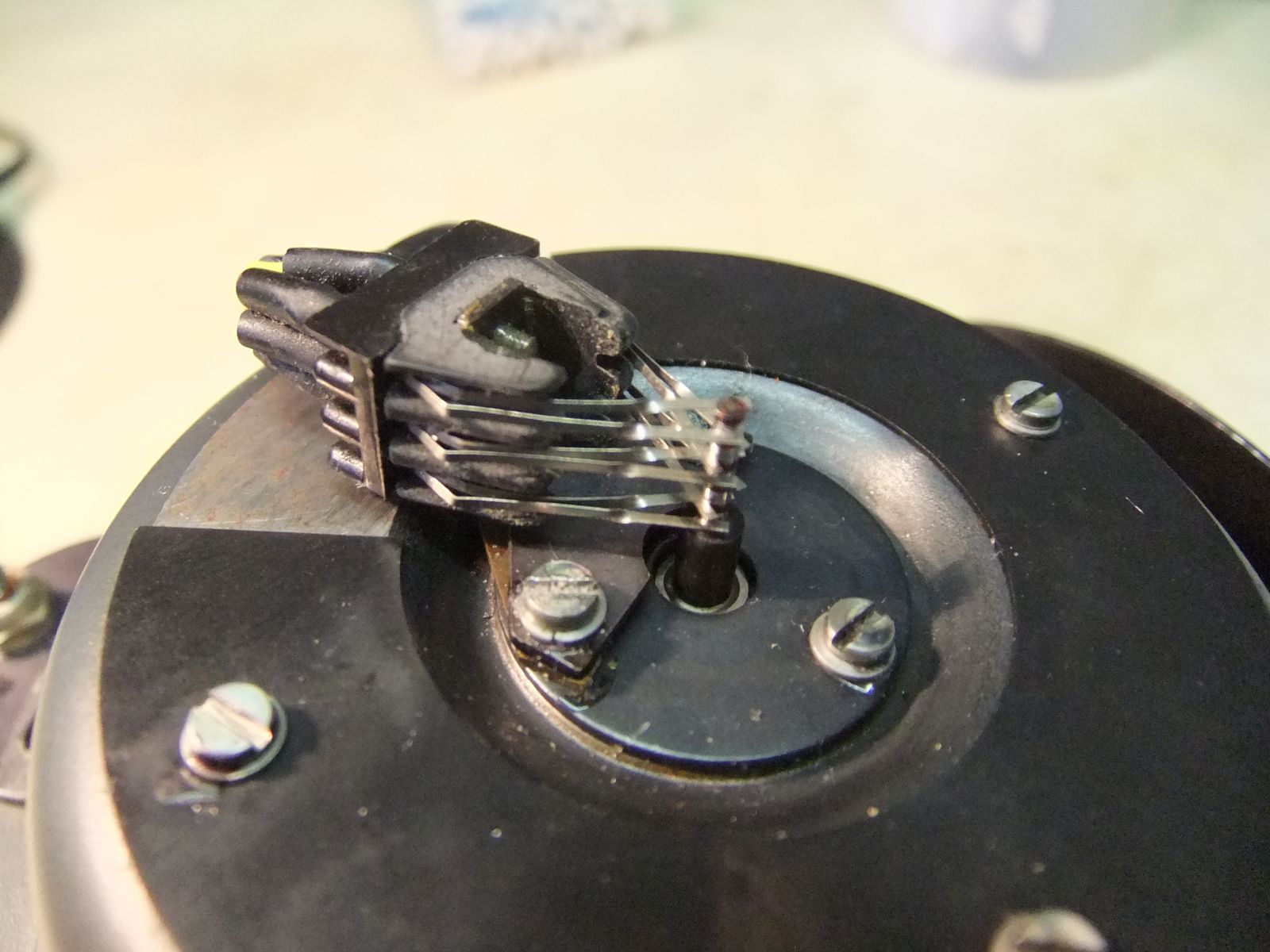
Première étape , sortir la cuve intermédiaire de la cuve externe après avoir déposé les balais
On distingue bien le capteur de position
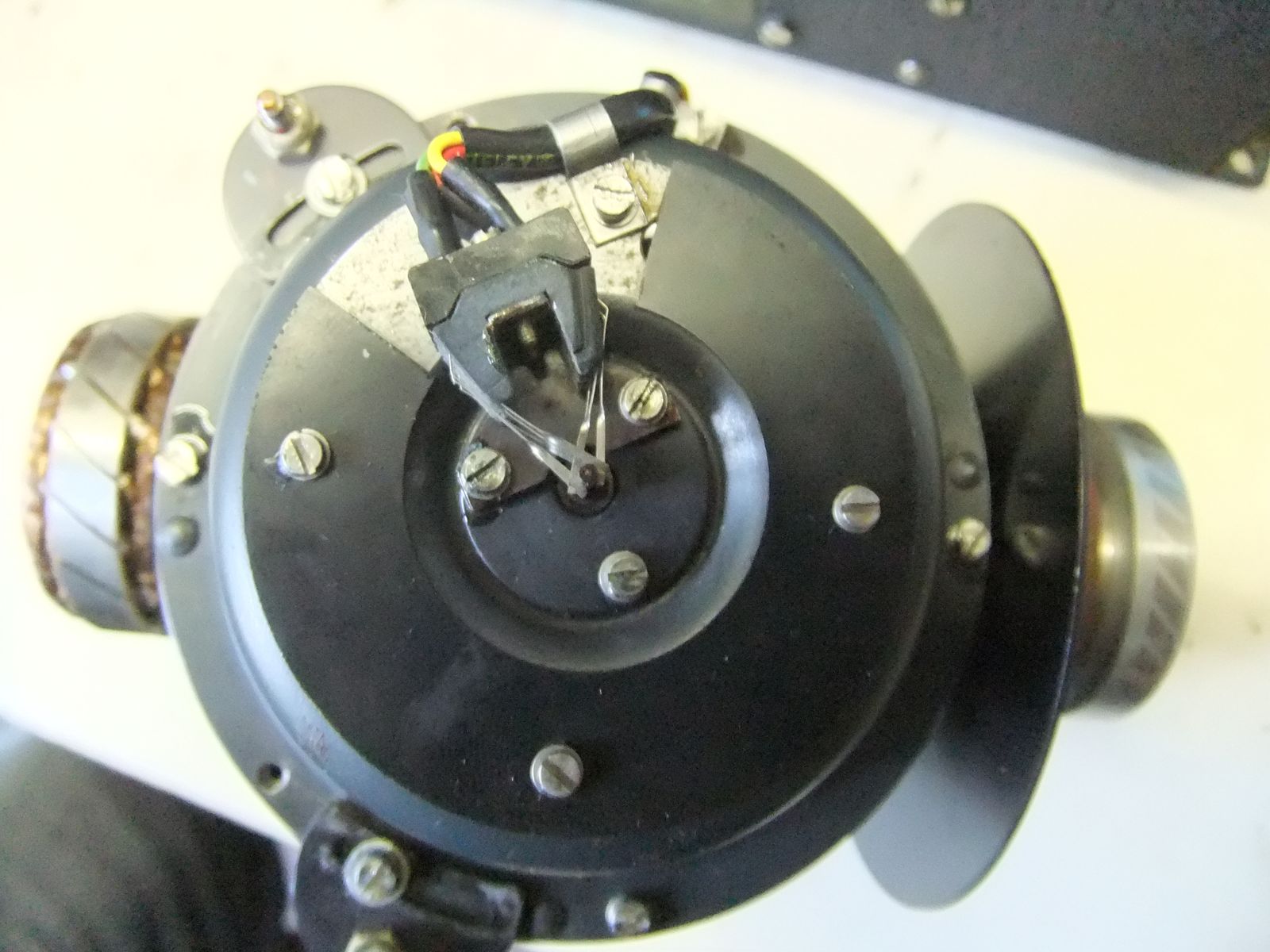
J’ai sortie la toupie pour ne rien abimer autour
D’ailleurs la toupie elle-même n’est pas visible , elle est scellé dans une cuve hermétique et sous atmosphère neutre
Ce genre d’appareils d’une incroyable complexité que répare Alain m’ont toujours laissé baba : c’est ouf !
Je te souhaite réussite dans cette vaste et belle restauration.
on dirait qu’il n’y a pas de Hg dans ce truc mais un liquide ?
ce ne serait pas plutot une R variable en fonction de l’inclinaison
a l’horizontale meme R des deux cotes
si on l’incline : la R augmente d’un cote et diminue de l’autre ???
si c’est un electrolyte la mesure ne peut pas etre faite en continu ( problemes de polarisation) elle doit etre faite en alternatif
sans doute une elucubration de ma part ?
apres recherche sur le net
Examples of sensors measuring continuous inclination include electrolytic tilt sensors. These sensors typically consist of an electrolytic fluid (electrolyte) partially filling a tube with three electrodes (one-axis sensors) or five electrodes (two-axis sensors) at its base.
J’avais pensé à ça , mais déjà en continu la résistance reste infini
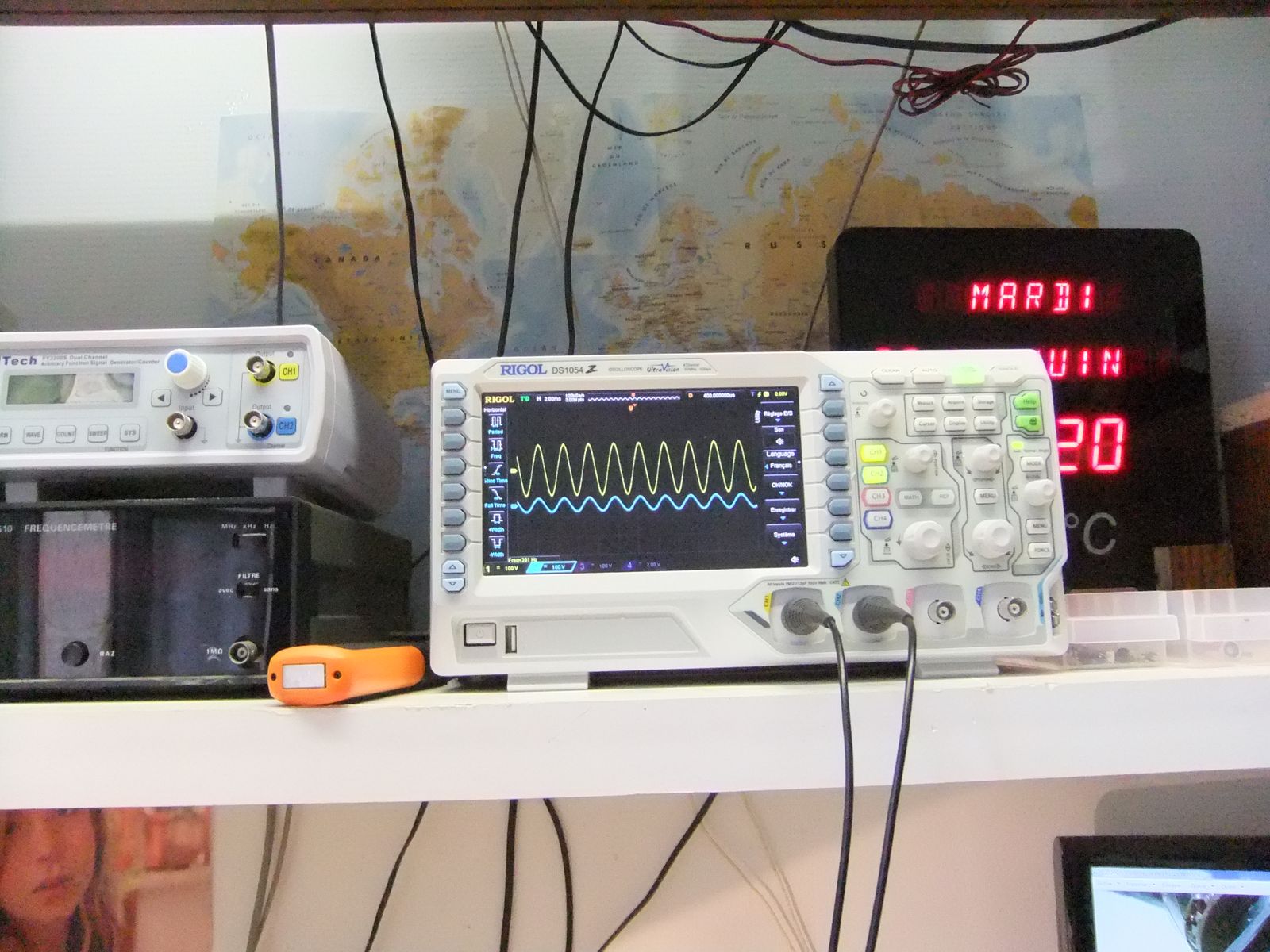
Par contre quand j’envoie du 117 volts 400 hertz sur l’électrode centrale et que je mesure avec l’oscillo sur les deux électrodes de sortie , j’ai toujours 117 volts des deux cotés quelque soit la position du capteur
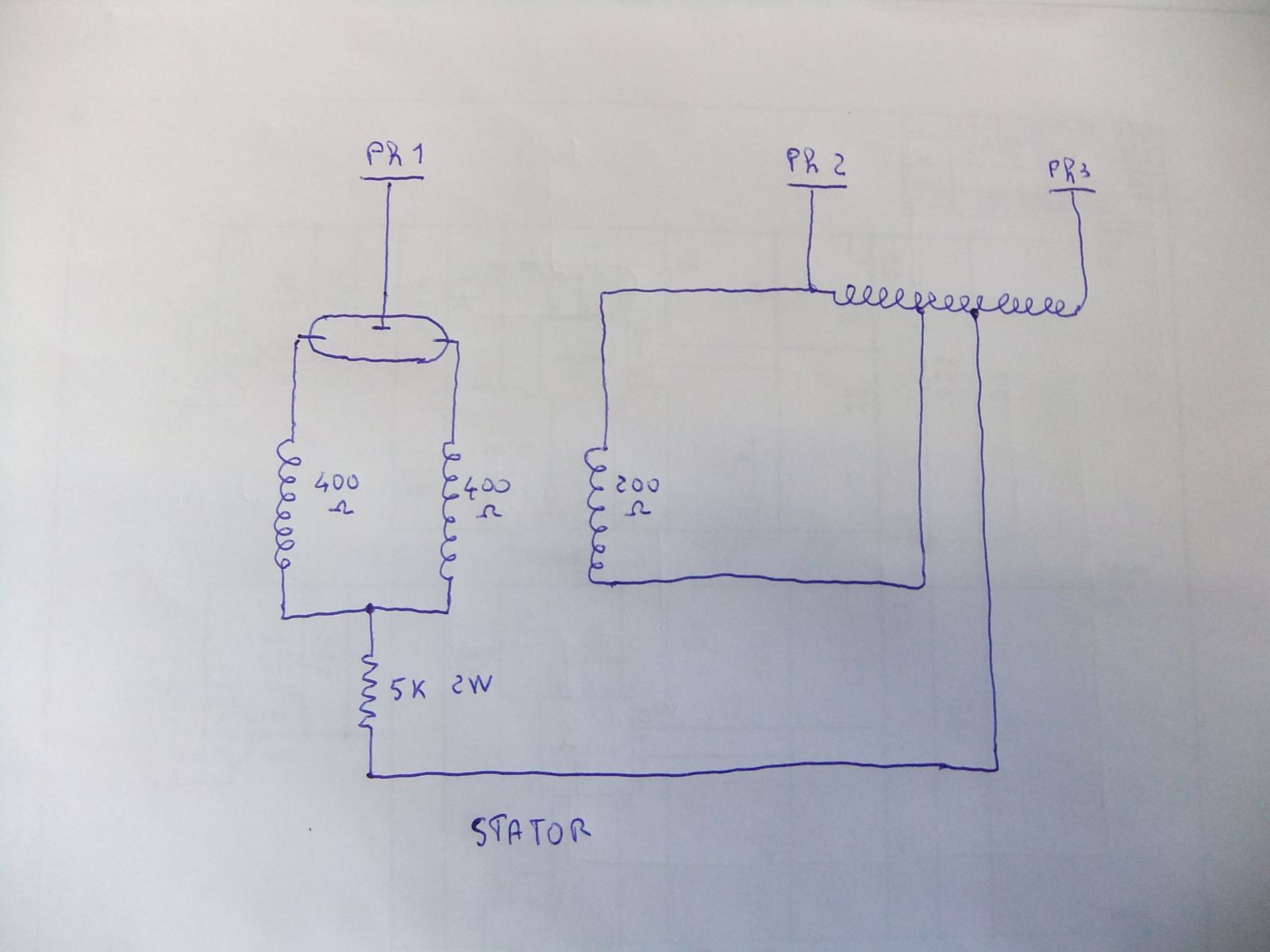
D’après mon schéma le point central du capteur est relié à la phase 1 , les deux extrémités du capteur vont chacune à une bobine de 400 ohms qui oriente dans un sens ou dans l’autre le gyro
L’autre coté des deux bobines sont reliés ensemble et vont à un point intermédiaire d’un petit auto-transfo qui est alimenté à ses extrémité par les phases 2 et 3
Il y a aussi une bobine d’excitation ( fixe ) qui va aussi à un point intermédiaire du transfo et de l’autre coté reliée à la phase 2
en continu c’est normal cela se polarise illico
avec un bon ohmmetre aiguille tu dois voir une breve deviation lorsque tu inverses la polarite de mesure
tu peux faire un petit schema du systeme
il faut une petite charge sur les sorties je pense
mais quelle valeur ??
1Mo de la sonde d’oscillo cela semble trop
essaye 470K puis 100K
faut pas trop descendre au risque de faire bouillir l’electrolyte et peter le truc
J’ai testé
Tu a raison avec 12 k de charge j’ai bien une variation très nette ( j’avais oublié de mentionner la résistance de 5k 2w au pieds des deux bobines )
Le problème pour faire des mesures in situ c’est qu’il faut tout remonter pour alimenter les bobines par les balais
Et quand tout est monté on n’accède plus à grand chose
Par contre j’ai deux broches du bornier de sortie qui vont chacune à un coté du capteur
C’est du 400Hz tu peux rallonger les fils , il apparaitra de toutes petires erreurs de positionnement
mais tu pourra voir fonctionner le systeme
deja ton capteur semble fonctionner
J’ai contrôlé le transfo sous tension à 400 hertz , il est bon
Les tensions présentes sont cohérentes avec les valeurs des enroulements
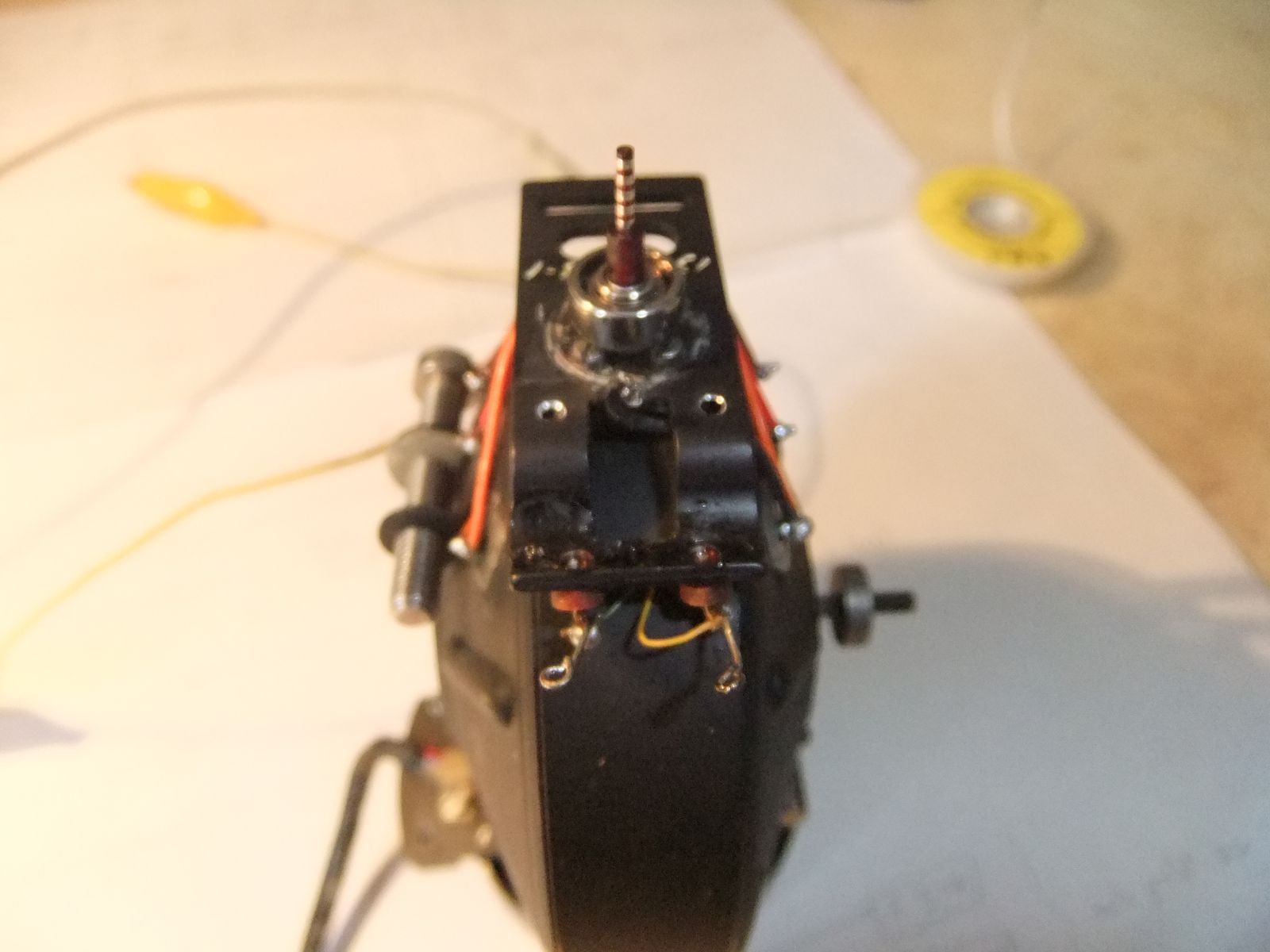
J’ai finalement remonté le détecteur de position puisqu’il ne parait pas en cause
C’est de l’horlogerie
Comme j’avais fais sauter les deux minuscules rivets j’ai dû tarauder le support (à 2 mm )
Heureusement qu’il faisait 6/8 dixièmes de mm
Prochaine étape , remonter cet ensemble dans la cuve interne et positionner les balais puis faire un test de cette partie avant remontage complet
Pour les détecteurs à bille de mercure , ils vont me servir sur un autre gyro ou ils sont manquant
J’avais compris que vous aviez réussi ensemble à alimenter toute cette usine et à la remettre en route. Je m’en souviens bien car j’avais tellement admiré votre travail en commun, bien différent du chacun-pour-soi habituel.
Oui je l’avais bien remise en route mais il subsistait quelques problème que je n’avais pas pu résoudre à cette époque
En l’occurrence une alim tri qui ne débitait pas assez pour alimenter tout les appareils annexes
J’utilisais principalement un convertisseur rotatif qui faisait énormément de bruit et qui consommait beaucoup
Voila l’usine à gaz de cette époque :
Et aujourd’hui en plus d’avoir une alim qui est assez puissante je dispose de toute une série d’appareils pouvant y être reliés et je me suis rendu compte que certaines fonctions me marchaient pas correctement
Donc c’est pour ça que j’ai décidé de m’y remettre de façon à pouvoir y brancher tout les instruments de bord nécessaires
De plus , entre-temps j’ai appris pas mal de choses qui vont m’aider
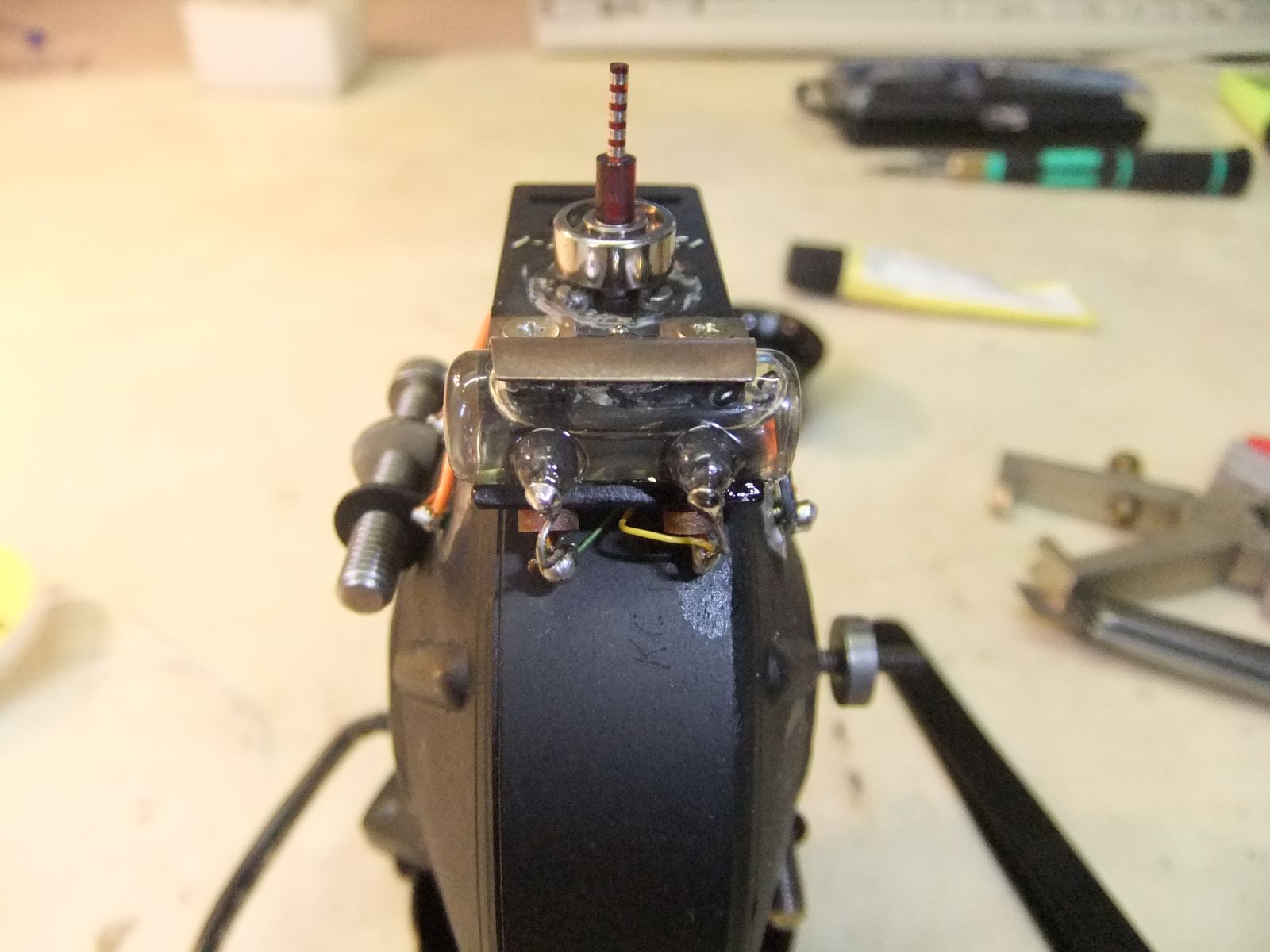
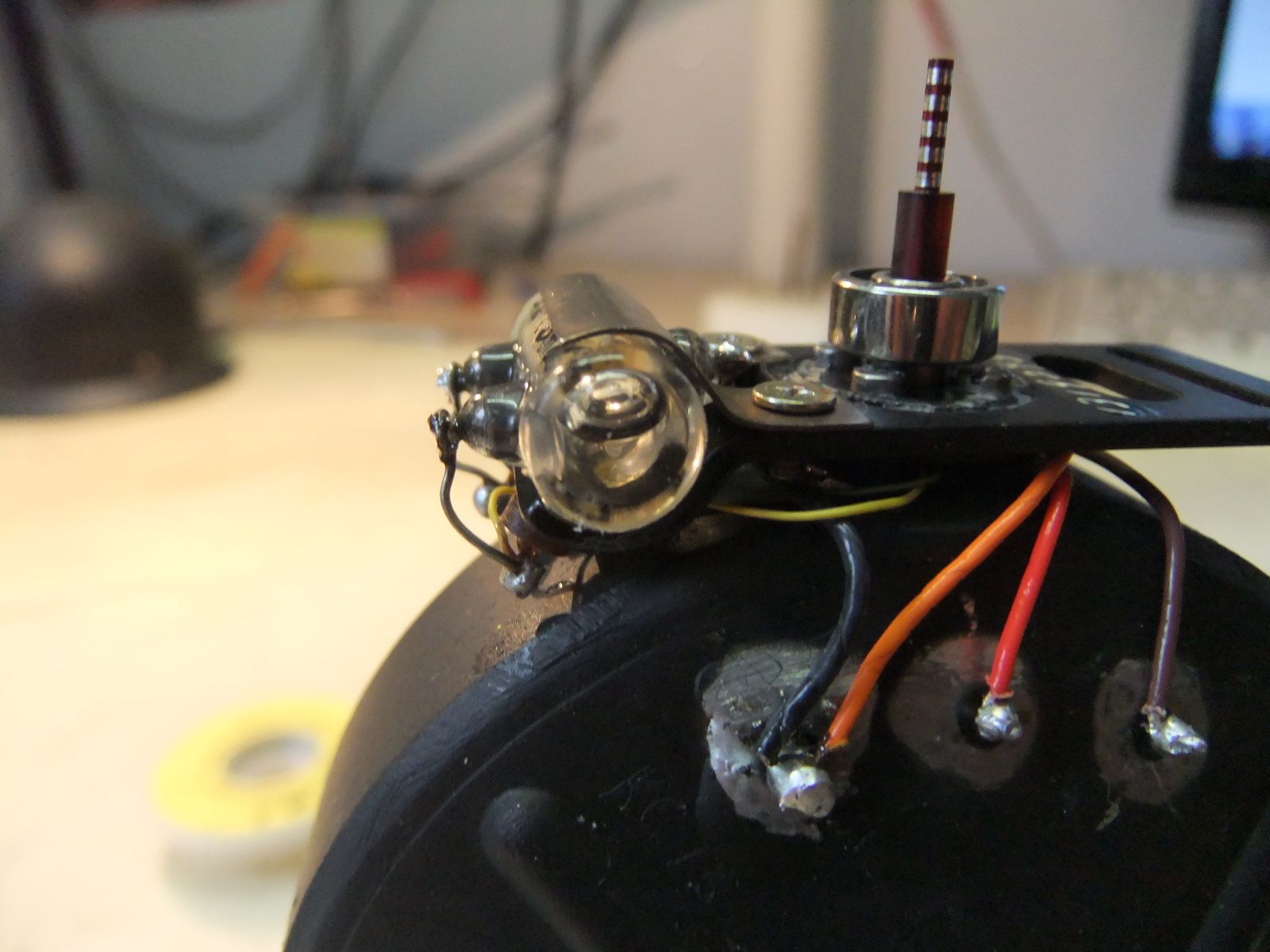
La suite du remontage :
La toupie du gyro ( dans son enceinte ) en place et dans la position qu’elle doit occuper au repos :
ensuite vient la galère , remise en place des balais qui on été légèrement tordus au démontage
Il y a 5 sorties , avec chacune deux balais de part et d’autre de l’axe
Et enfin un test de cette partie avant repose
Mise en route de la toupie et mesure en sortie du détecteur de position
La mise à la vertical de la toupie est assurée par deux bobines pendant la phase d’alignement puis ensuite c’est le détecteur de position qui fait tourner la cuve
La toupie change d’inclinaison par précession
C’est très précis car en bougeant la cuve à la main j’ai du mal à trouver le point d’équilibre
Prochain essai avec les bobines qui sont commandées par le détecteur de position
C’est à ce niveau qu’il y avait un problème , la toupie ne réagissait pas
C’est pour ça que j’ai cru à un problème sur le détecteur
Quelle est le principe de base de votre générateur statique de signal triphasé ? Je suppose que vous partez d’un générateur de faible amplitude dont vous amplifiez le signal par trois amplificateurs en classe D ou comme ça.
On en avait construit deux car la première n’était pas encore suffisamment puissante
La première c’était un projet que j’avais commencé il y a longtemps et que j’ai fini avec l’aide de Solange
on en parle ici :
Par la suite on avait décidé d’en faire une autre beaucoup plus puissante basée sur une autre technologie
Sur celle-la il ne vaut mieux ne pas toucher les sorties , ça pique :
Pour finir , cette deuxième alim a eu énormément de problèmes avec les amplis chinois comme l’avait prédit Solange
Finalement on a fait 3 amplis avec chacun un circuit TDA1521 monté en pont remplacer les amplis chinois
Depuis elle n’est plus jamais tombée en panne
 Doctsf (Modèles & Marques)
Doctsf (Modèles & Marques) Annonces
Annonces