Vous êtes dans des technologies de pointe que je n’ai pas connue dans l’armée quand j’y étais
Il y avait déjà les gyrolasers mais on n’y touchait pas , ça repartait directement chez le fabriquant , comme beaucoup d’autres instruments d’ailleurs
Pour revenir à mon vieux gyro , ça y est , il fonctionne
J’ai les trois informations d’attitude mais le montage est quand même un peu spécial
Les trois axes ne sont pas gérés de la même façon
Déjà l’axe de rotation n’est pas asservi , il ne doit y avoir qu’un indicateur de cap branché sur le gyro à travers un ampli
Il va surement falloir faire un peu d’électronique là autour
On va commencer par le cap
Sur cette photo je tiens la centrale à la main , on distingue sur l’oscillo les sinusoïdes qui indiquent un déplacement suivant deux axes
La trace du centre correspond au cap , mais comme je ne tourne pas la centrale sur elle-même , il n’y a rien
Il va me falloir une référence en phase pour connaitre le sens du mouvement
Bonsoir
Avec la pluie , j’en ai profité pour faire un câblage propre qui regroupe les différentes fonctions dans des gaines séparées ( sortie gyros , alimentations , sortie indication de positions , entrés moteurs … )
J’en avais marre de tout ces fils qui s’emmêlaient
Maintenant je me galère pour y adapter un indicateur de cap
Il ne sort pas de signal triphasé mais seulement une sinusoïde qui varie en amplitude , la phase est inversée suivant le sens du déplacement
Ce n’est pas très compatible avec ce que j’ai en indicateur de cap qui demande un signal tri sur le stator
Je vais voir si je peut intercaler un selsyn pour récupérer une information tri en fonction de son angle de rotation
Ben tu ne croyait pas si bien dire
Je viens de passer la journée ( comme il pleut ) à essayer de résoudre les problèmes d’asservissement
Il n’y a rien comme sur les autres centrales que j’ai eu entre les mains
Déjà la détection de mouvement par les gyros ne se fait qu’en mono , avec juste une inversion de la phase suivant le sens de déplacement et une variation d’amplitude suivant la vitesse de déplacement
Pas compatible avec les instruments nous avons et qui fonctionnent tous en triphasé , avec asservissement ou pas
J’ai fais des essais en essayant de convertir le signal avec des selsyns mais ça ne fonctionne pas correctement
La détection d’inclinaison se fait par des transducteurs qui délivrent eux aussi un signal mono
rien quand ils sont droit puis phase inversée de 180° suivant le sens d’inclinaison et amplitude qui augmente plus l’inclinaison est prononcée
L’information reste tant que le transducteur n’est pas revenu à sa position initiale , contrairement aux gyros ou c’est fugitif
De plus le transducteur de tangage est bien monté sur le cardan du tangage et bouge avec lui , mais le deuxième transducteur ( celui de roulis ) est monté sur le corps de la centrale elle même et non pas sur le cardan de roulis ( il n’y a rien pour le lacet , ou l’indication de cap )
Je ne comprend pas trop comment ramener le cardan de roulis à sa position d’origine si le transducteur ne bouge pas avec lui
La solution serai d’utiliser le potentiomètre qui change de valeur avec l’inclinaison du cardan de roulis mais le transducteur étant sur le corps de la centrale indiquera toujours une inclinaison tant que l’avion n’aura pas repris un vol horizontal
Pour le tangage , le problème est plus simple , puisque si je commande le moteur de ce cardan avec l’information de son transducteur , quand le signal diminuera le moteur ralentira jusqu’à son arrêt en position correcte puisque le transducteur suivra le mouvement du cardan
Mais il y a encore un os
Les moteurs n’ont pas de point milieu
Il faut donc les commander par inversion de phase par rapport à leur excitation , impossible d’utiliser les amplis symétriques que j’ai et qui fonctionnent par comparaison par rapport à une phase de référence
J’ai galéré toute la journée là-dessus et je vais laisser refroidir un peu mon cerveau avant de m’y remettre
J’ai bien trouvé un gros document sur le système de navigation du Vulcan mais rien qui puisse m’aider
J’ai vu que c’était quand même un gros appareil , bombardier de dissuasion nucléaire entré en service en 1962 et retiré en 1984
je les voyais passer presque tous les jours (avec des Victor et des Lightning) à très haute altitude dans les années 70 en allant ou revenant à la base de la RAF à Chypre
ils communiquaient avec Marseille contrôle sur 134,700 MHz, la fréquence est toujours active
ici, pris au 300 mm et recadré (fond sombre car ciel très bleu de beau temps)
C’est un bel appareil
Il semble décoller très court sur la vidéo , c’est un engin que j’aurai aimer piloter
J’ai trouvé sur le net quelques photos du poste de pilotage et du poste de tir
Il y a une quantité impressionnante d’instruments et je pense que la centrale que j’ai n’est qu’un tout petit élément d’un énorme ensemble de guidage et de commande de tir
Bon , il ne me reste plus qu’à trouver le reste de l’avion pour mettre autour de ma centrale inertielle
Il y a eu pas mal de reportages sur cette casse exceptionnelle, en cherchant un peu on doit en trouver d’autres, de différentes époques.
Pour faire ses courses là bas, il faut prévoir un grand caddie
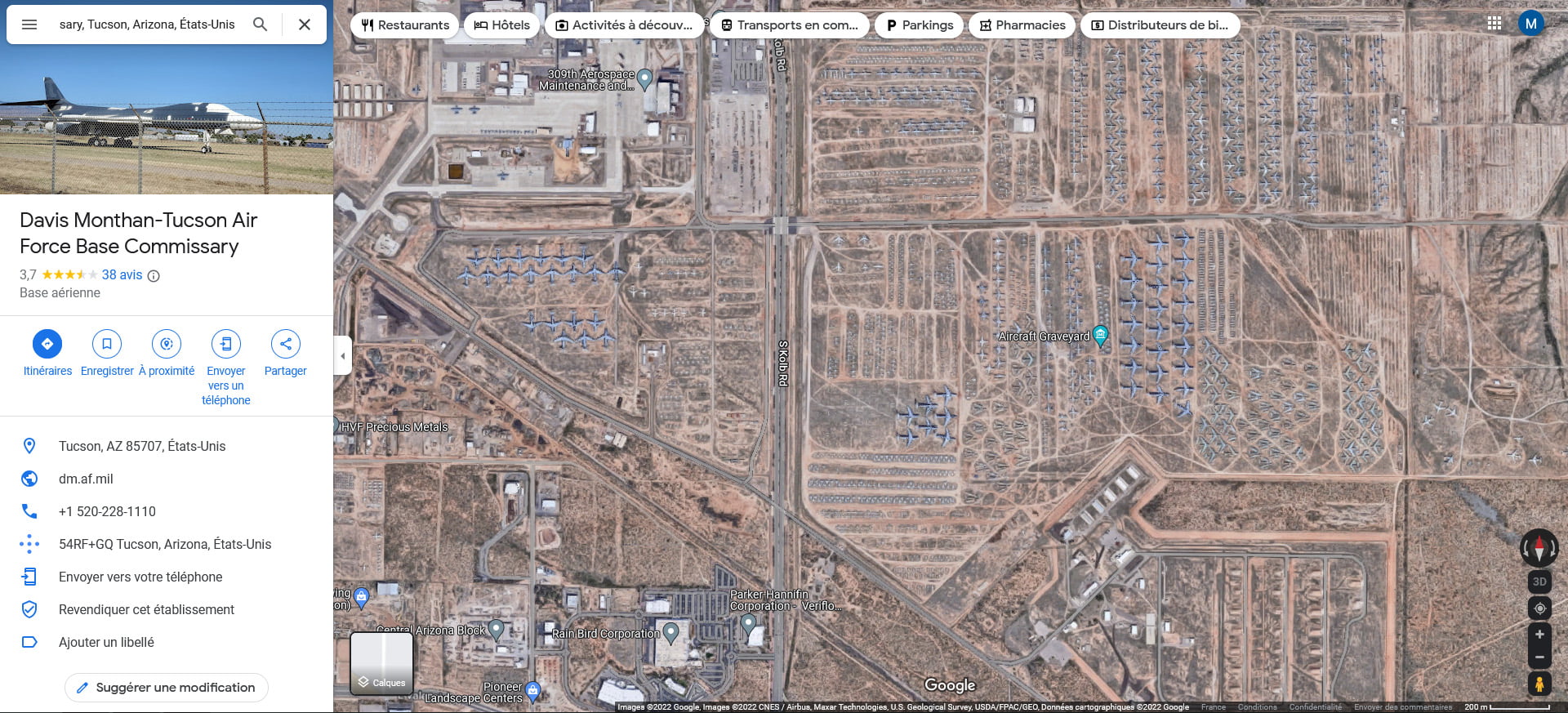
Oui, c’est à la base « Davis Monthan » dans le Nevada
on la voit bien avec google maps
mais il n’y a pratiquement que des zincs américains là-bas
les réacteurs Olympus du Vulcan ont été améliorés et montés sur le Concorde
Il y en a aussi une en France
C’est Tarmac Aérosave à coté de l’aéroport de Tarbes-Lourdes
J’ai toute leurs coordonnées et je les ai contacté pour de la connectique , mais pas eu de réponses
C’est dommage , car ils récupèrent les instruments valables mais toutes la connectique et les faisceaux restent sur les épaves
J’y ferai bien un tour un de ces jours , c’est quand même plus près que le Nevada , et puis c’est des appareils européens
J’ai visité il y a plus de 20 ans le Pima Air and Space Museum qui se trouve juste à côté. Pas mal d’avions militaires exposés (certains semblaient avoir été peinturlurés à la va-vite), dont le fameux SR-71 « Blackbird ».
Bof !! Arizona ou Nevada , c’est trop loin de toute façon
Après un bon refroidissement de cerveau , j’ai cherché une autre solution ce matin
Dans mon bazard , j’ai retrouvé un ampli assez puissant pour entrainer le moteur , et qui n’est pas symétrique
C’est un gros ampli BF stéréo qui marche en 24 volts , avec plusieurs impédances de sorties ce qui me permet d’adapter la sortie au moteur
Par contre le réglage d’entrée est très pointu , ça accroche très vite , il va falloir que je règle aussi ce problème car c’est prévu pour une entrée micro
Mais ça fonctionne , il faut juste que j’améliore maintenant en adaptant correctement l’entrée
Et comme il y a deux amplis , j’en aurai un pour chaque moteur
C’est un ampli de sonorisation , pour les voyages organisés ou il y avait un commentateur
Prévu pour une série de HP et fonctionne en 24 volts continu , et stéréo ( et ça m’arrange , il me faut deux amplis pour les deux moteurs )
Mais ce sont des entrées « micro » et il a fallu que j’adapte le niveau de sortie du transducteur pour ne pas saturer l’ampli
Et mon problème d’accrochage sur la sortie venait de la vieille alim Philips ajustable que j’utilisais pour alimenter l’ampli
J’ai rajouté un filtre en PI à la sortie et c’est bon
Les capas de cette alim doivent commencer à faiblir
Finalement j’ai récupéré le 24 volts dans mon alim et monté un pont avec un filtre et c’est bon
Plus besoin de l’alim externe
Le montage fonctionne correctement
Pour l’autre moteur , ça va être plus compliqué puisque le transducteur ne bouge pas avec le berceau mais j’ai peut-être une solution
@RxControl
J’ai regardé le lien , on y vois beaucoup d’appareils reliés ensemble mais on ne sais pas trop ce que c’est
Par contre j’aimerai savoir comment elle à bien pu récupérer tout le câblage
Déjà que j’ai du mal à trouver juste quelques connecteurs
Je viens de faire exploser mon alim 400 hertz de puissance
On en avais parlé avec l’indien , Solange ne voulait pas faire un montage utilisant des modules ampli chinois car elle disait que ce n’était pas fiable
J’aurais dû l’écouter
Deux des modules ont lâché
C’est pas tant les modules qui m’embêtent , c’est les dégâts provoqués derrière
Ça a surement fait claquer les énormes triples darlingtons de puissance du pont
La petite que j’avais conçu entièrement n’est pas assez puissante pour cette grosse centrale
Je vais devoir ressortir l’APU qui fait un bruit d’enfer si je veux continuer les essais
En plus j’avais branché l’autre moteur et ça avait l’air de fonctionner
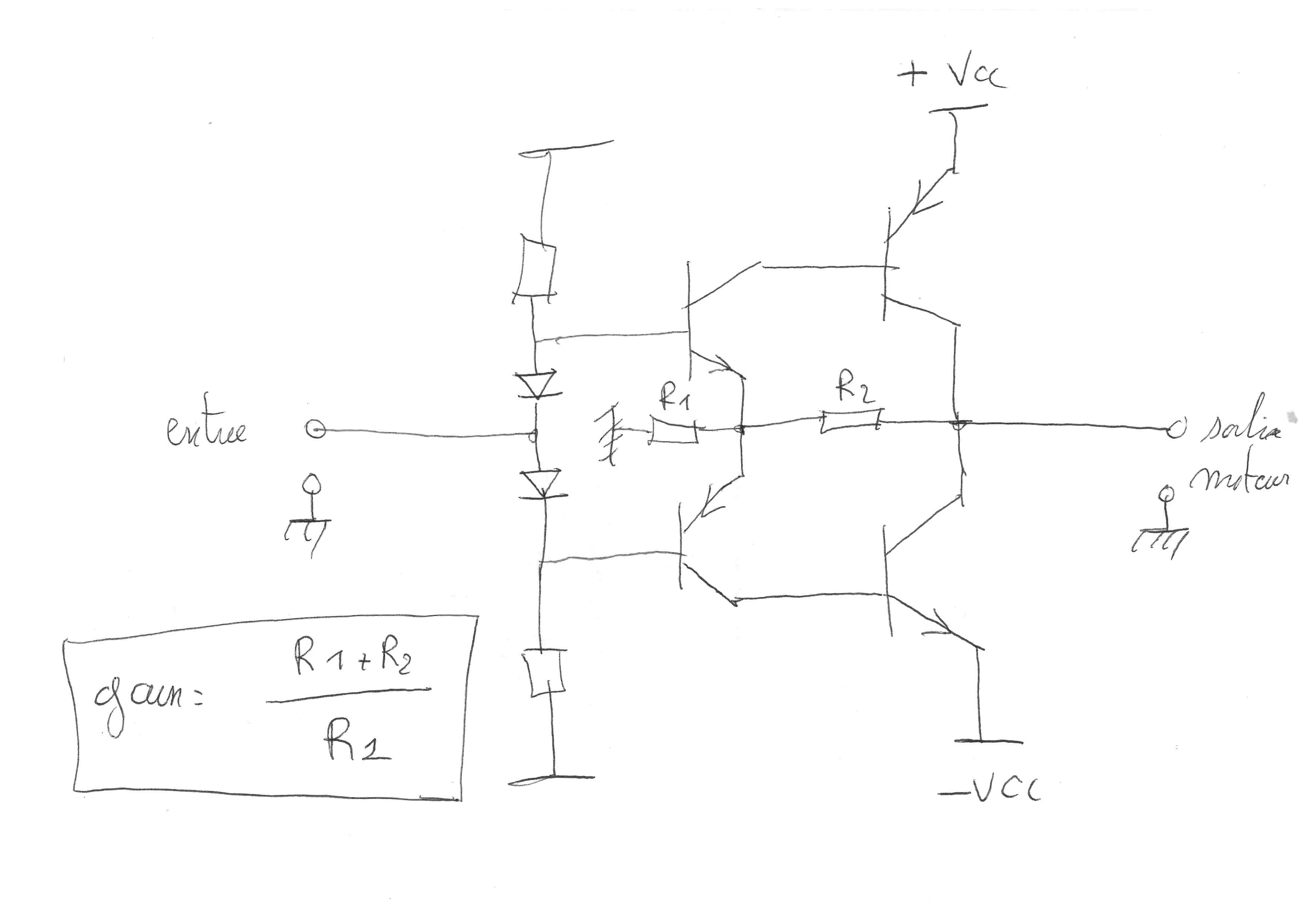
Le gain ne doit pas être trop important, sinon l’asservissement est instable (le moteur fait des allers-retours sans arrêt), ni trop faible, sinon l’asservissement est « mou » (le moteur se cale à une position très imprécise).
Cet ampli a un gain maxi assez faible, il peut être necessaire d’ajouter un AOP en tête…
 Doctsf (Modèles & Marques)
Doctsf (Modèles & Marques) Annonces
Annonces